2025 FRC Robot

This is the 2025 FRC Robot my team and I designed for the FIRST Robotics Competition game, Reefscape. This page is a writeup on each of the mechanisms I focused on. The goal of this robot was to pick up 4" diameter pipes off of the ground, and score them on a "reef", a tree of steel pipes acting as branches. Additionally, this robot could pick up 16" playground style balls, and shoot them up into a large trough around 9 feet in the air. We had a group of 4 students working to design this, and below are the mechanisms I designed for this robot.
The Elevator
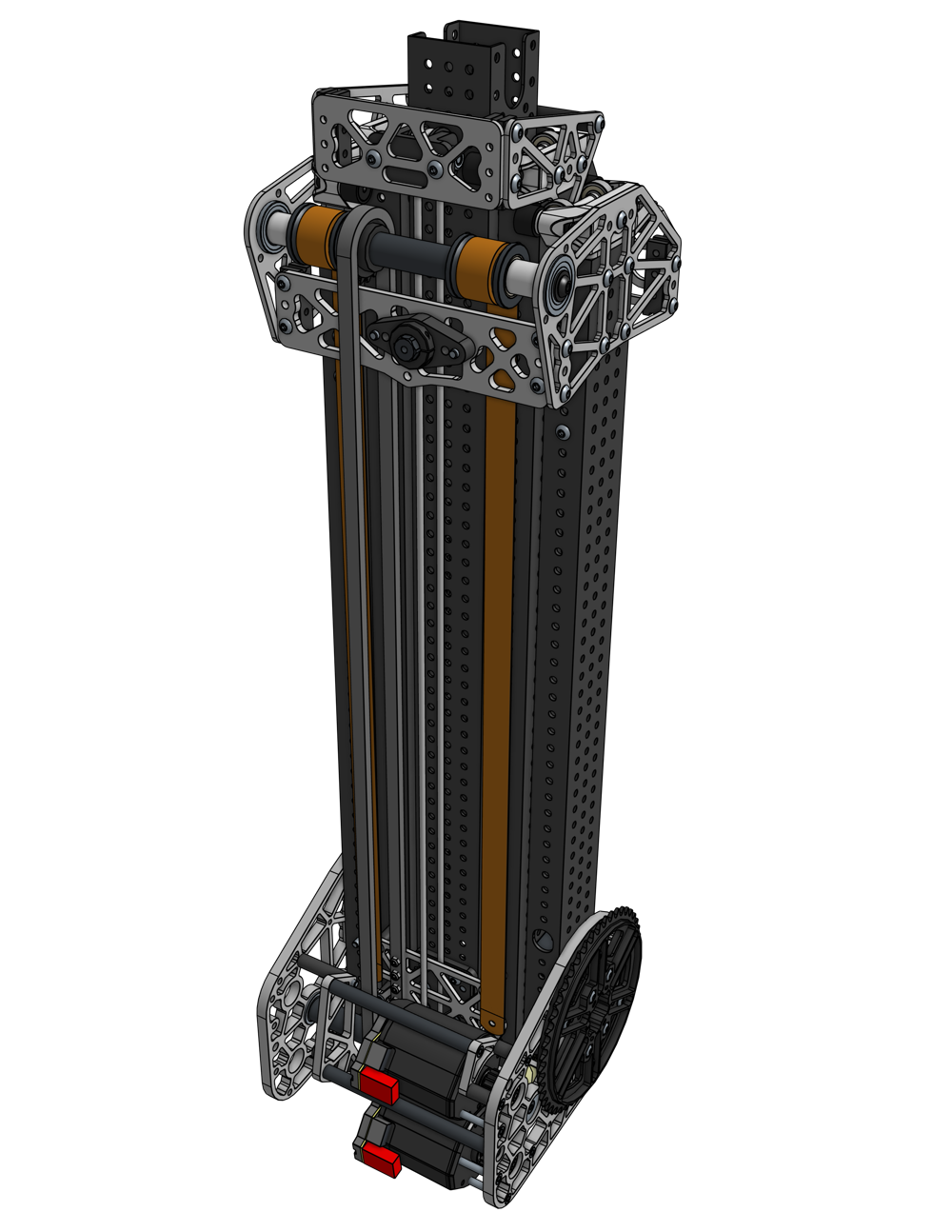
The elevator's goal was simple: extend linearly up to 6 feet. Although this task sounds basic, integrating it onto an off-centered pivot, as well as accounting for wiring was not an easy job. The elevator uses 2 Kraken x60 motors to power the first stage with #25 chain. The second stage of the elevator is rigged off of the first stage with dyneema rope, a strong nylon string, which allows both stages of the elevator to extend simultaneously. In order to optimize the scoring of the entire robot itself, the elevator needed to be light. I spent tons of time taking weight out of the mechanism through pocketing the plates, and removing any unnecessary material. In total, the elevator weighed a mere 18lbs.
The Hand
The hand was by far the most difficult mechanism on the robot due to it's weight budget and size restrictions. This hand is made out of a combination of machined aluminum and polycarbonate. It's rotation is powered by a Kracken x60, as well as the rotation of the wheels and rollers. The biggest issue with this hand was keeping the MOI (moment of inertia) low to reduce backlash.
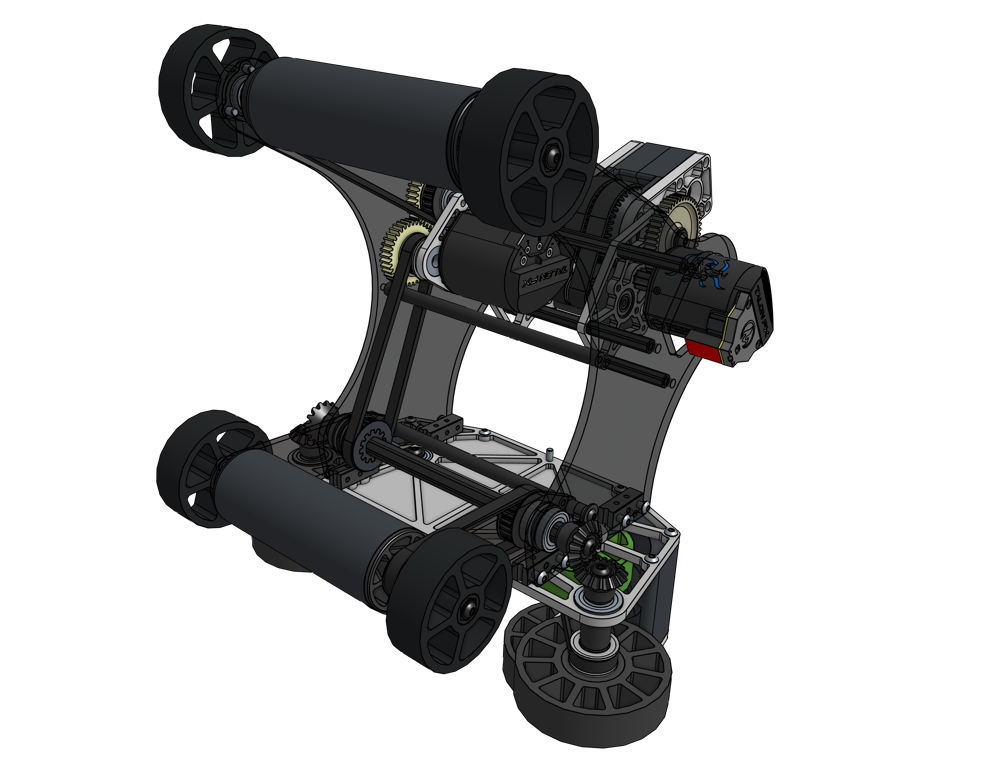
The Climb

This is my favorite mechanism I've ever designed. It is simple, effective, and extremely robust and reliable. Essentially, the wheels are powered by (yet again) a Kracken x60, and spin to suck in a steel bar (called the cage). The wheels would bring the steel bar into a narrow slot, where it would pass through a set of spring powered latches. Once it passed the latches, it would be locked in place, allowing us to pivot our elevator and get the robot off the ground.
Home